Automated Substation Inspection Car
Autonomous & Remote-Controlled Substation Inspection Vehicle A state-of-the-art inspection vehicle engineered for preventive maintenance and remote visual monitoring of high-voltage electrical substation equipment. Built on the ESP32-CAM platform, this vehicle enables real-time surveillance, and enhanced operational safety by minimizing human exposure to hazardous environments.
1. Project Overview & Objectives
Executive Summary
This project delivers a cost-effective, remote-controlled Industrial IoT (IIoT) platform for substation asset monitoring. The system enables comprehensive remote inspection, significantly reducing the safety risks and logistical challenges associated with human entry into high-voltage environments for routine visual assessments. By integrating real-time video streaming and autonomous control, the platform enhances operational efficiency and ensures timely fault detection in critical electrical infrastructure
Core Objectives
- Primary Goal: Develop and validate a ruggedized Remote-Controlled Vehicle (RCV) designed for critical infrastructure inspection, emphasizing durability, reliability, and extended wireless communication range within substation environments.
- Technical Aim: Develop a dual-mode control system for vehicle movement and pan-tilt camera operation, using an Asynchronous Web Server for low-latency, high-resolution video streaming to enable early fault detection and enhance substation safety.
Development Timeline
-
Phase 1: Hardware & Power Isolation
Assemble the chassis, perform EMI shielding analysis, test motors, integrate the L298N driver, and implement a Battery Management System for safe, extended operation.
-
Phase 2: IIoT Firmware & Web Control
Develop ESP32 firmware for stable Wi-Fi, MJPEG video streaming, dual-mode vehicle and pan-tilt control, and low-latency WebSocket command processing, optimized for energy-efficient operation.
-
Phase 3: Field Validation & Reporting
Integrate and test the full system, validate wireless range, video latency, and telemetry accuracy, document results, and prepare for thesis submission and project defense.
2. Technical Architecture & Implementation
Core Technology Stack
The system uses ESP32-CAM for real-time video and control, with Arduino (C++) firmware for efficient hardware interfacing. A fault-tolerant asynchronous server and WebSockets ensure reliable, low-latency operation. The responsive web UI provides live telemetry and actionable operational insights, making it ideal for mission-critical industrial applications.
Detailed Wiring Schematic & Power Isolation
The schematic below illustrates the critical electrical connections, highlighting the isolated power architecture for the motor supply. This separation ensures system stability and prevents voltage dips during high current draw—essential in electrically noisy environments like substations. Motor power supply is isolated from the logic circuits to maintain stable ESP32 operation. Pan-Tilt servos are powered through regulated rails to ensure precise camera positioning. L298N Motor Driver controls all four DC motors with separate power rails to prevent interference with sensitive electronics.
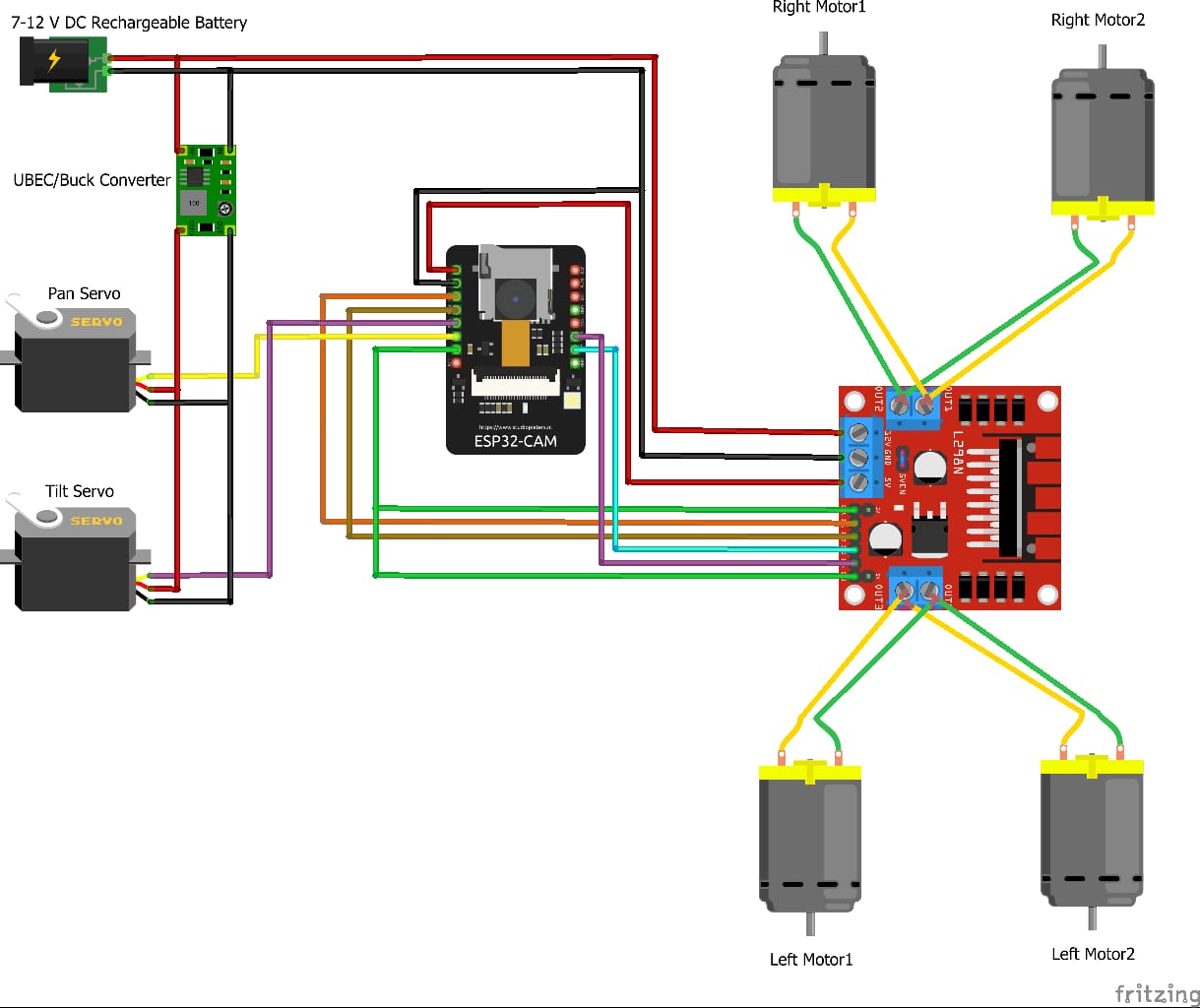
Schematic illustrating ESP32-CAM, L298N Motor Driver, and Pan-Tilt Servo connections with separated power rails.
Working Demo & Inspection Process
Video Demonstration of Field Operation
Step 1: Network & IoT Link
The vehicle establishes a reliable Wi-Fi connection (Station or Soft AP mode), automatically providing the control interface through the local gateway IP..
Step 2: Mission-Critical Control
The custom web interface transmits movement and pan/tilt commands instantly via a WebSocket connection, ensuring minimal latency for precise inspection operations.
.Step 3: Real-Time Anomaly Feedback
The ESP32 streams live MJPEG video to the operator, enabling real-time visual verification of equipment status, such as oil levels and connection integrity.
Gallery: Team Working on the Project


Resources & Documentation
Full Thesis Document
Detailed theory, methodology, results, and analysis of the IIoT Substation Vehicle.
Download PDFSource Code & CAD Files
Firmware, Web Interface files, and all component design files.
View on GitHubField Deployment Manual
Step-by-step assembly, programming, and safe deployment procedures.
Get GuideMeet the Team & Mentor
![Project Guide Dr. [Guide's Name]](6.-Mohammad-Ashar-283x300.jpeg)
Mr. Mohammad Ashar
Project Guide
Leading the future of industrial automation with innovative IoT solutions. This team has excelled in developing a robust, real-world application.




